
En este artículo, una presentación del trabajo final de Héctor Sifon, ingeniero de YPF Upstream, en el marco del posgrado de Especialización en Automatización Industrial de la Facultad de Ingeniería de la Universidad de Buenos Aires.
Durante el desempeño diario del ingeniero de control, suele ser necesario realizar ajustes de lazos PID, usualmente en situaciones donde no se dispone de modelo dinámico de la planta, y muchas veces, tampoco del tiempo para su obtención. Producto de esto, la mayor parte del trabajo de ajustes de lazos de control se realiza prescindiendo de las herramientas analíticas ampliamente conocidas y muy efectivas. A los efectos de salvar esta problemática, se planteó como objetivo del trabajo el desarrollo de un software de asistencia para la identificación de modelos y ajuste de lazos de control. La herramienta obtenida como resultado de este trabajo permite identificar los parámetros del modelo, cuyo orden es definido por el usuario, a partir de la importación de datos de una prueba del tipo “Bump test” realizada sobre el lazo de control.
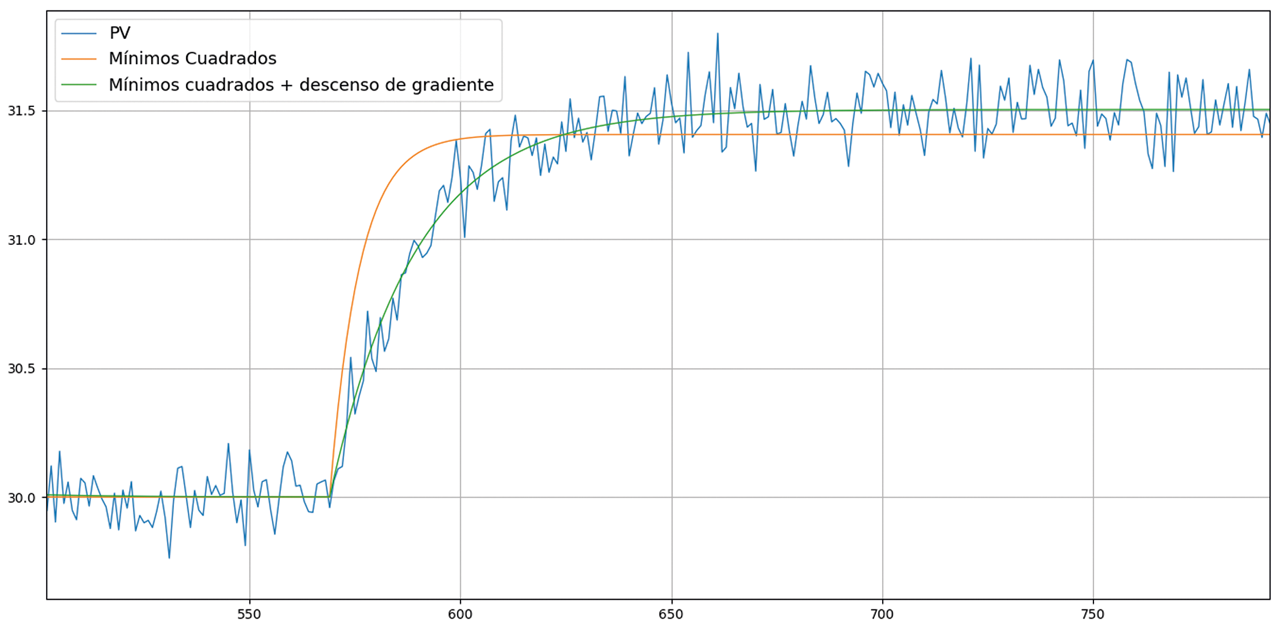
Para la identificación de parámetros se utilizó el método de estimación por mínimos cuadrados, a lo que se adicionó una etapa de ajuste final por método de descenso de gradiente. Esta última etapa permite corregir los casos donde, por presencia de ruido de medición, se obtengan parámetros con sesgo de estimación, lo cual es inherente al método de mínimos cuadrados.
Cabe mencionar que, al considerar como punto de partida para el algoritmo de descenso de gradiente, la estimación obtenida por mínimos cuadrados, se elude la problemática de mínimos locales que puede suceder si se utiliza el método de descenso de gradiente por sí solo. Con esta combinación en etapas de algoritmos, se ha obtenido un buen desempeño en la estimación de parámetros de modelos aún en condiciones de señales ruidosas.
Para la identificación de parámetros se utilizó el método de estimación por mínimos cuadrados, a lo que se adicionó una etapa de ajuste final por método de descenso de gradiente. Esta última etapa permite corregir los casos donde, por presencia de ruido de medición, se obtengan parámetros con sesgo de estimación, lo cual es inherente al método de mínimos cuadrados.
Cabe mencionar que, al considerar como punto de partida para el algoritmo de descenso de gradiente, la estimación obtenida por mínimos cuadrados, se elude la problemática de mínimos locales que puede suceder si se utiliza el método de descenso de gradiente por sí solo. Con esta combinación en etapas de algoritmos, se ha obtenido un buen desempeño en la estimación de parámetros de modelos aún en condiciones de señales ruidosas.
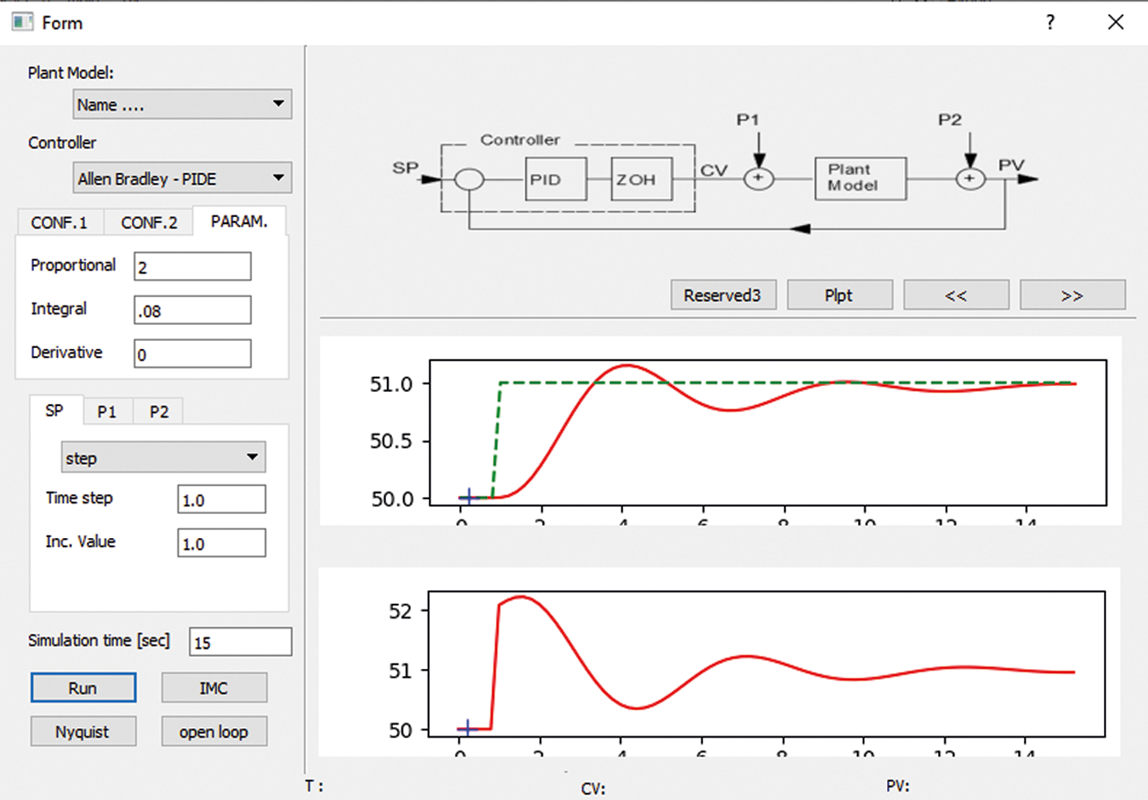
Adicional a la funcionalidad de identificación de modelo, el software desarrollado posee un entorno de simulación, el cual permite verificar el comportamiento a lazo cerrado para distintas configuraciones del controlador, siendo posible verificar el desempeño ante perturbaciones y cambios de “set point”. Por otra parte, la herramienta puede también obtener la configuración del controlador por método de IMC y calcular la distancia entre el gráfico de Nyquist al punto crítico, lo que da una idea de la robustez del ajuste realizado sobre el PID; logrando así un conjunto de funcionalidades que resulta muy útil como herramienta de apoyo en la tarea diaria del ingeniero de control.
Durante el desempeño diario del ingeniero de control, suele ser necesario realizar ajustes de lazos PID, usualmente en situaciones donde no se dispone de modelo dinámico de la planta, y muchas veces, tampoco del tiempo para su obtención.
Acerca de la Especialización
La carrera de Especialización en Automatización Industrial es un posgrado profesional de la Facultad de Ingeniería de la Universidad de Buenos Aires (FIUBA) que se cursa en tres cuatrimestres.
Durante el periodo lectivo 2019-2020 tuvo una implementación particular: por un convenio entre YPF y FIUBA, se dictó para un grupo formado exclusivamente por ingenieros e ingenieras de YPF Upstream. La experiencia resultó muy interesante y productiva, tanto para el personal técnico de YPF como para los docentes e investigadores de FIUBA.
Según el plan de la especialización, después de completar las materias de los tres cuatrimestres, el alumnado debe preparar y defender un trabajo final para obtener su título. El objetivo es integrar lo aprendido con alguna problemática del ambiente laboral en el que se desenvuelve cada estudiante.
Durante el periodo lectivo 2019-2020 tuvo una implementación particular: por un convenio entre YPF y FIUBA, se dictó para un grupo formado exclusivamente por ingenieros e ingenieras de YPF Upstream. La experiencia resultó muy interesante y productiva, tanto para el personal técnico de YPF como para los docentes e investigadores de FIUBA.
Según el plan de la especialización, después de completar las materias de los tres cuatrimestres, el alumnado debe preparar y defender un trabajo final para obtener su título. El objetivo es integrar lo aprendido con alguna problemática del ambiente laboral en el que se desenvuelve cada estudiante.
Autor:
Todas las publicaciones de:
Publicado en:
Número:
Mes:
Año: