
Los accionamientos de tracción necesitan operar de la manera más eficiente posible para maximizar la autonomía de conducción de los vehículos. El medio más frecuente para evaluar la eficiencia energética de los móviles es examinar su rendimiento a través de ciclos de conducción y de los mapas de eficiencia.
Ciclos de conducción
Un ciclo de conducción es un perfil representativo de la velocidad del vehículo en función del tiempo bajo diferentes circunstancias, que representa una forma típica de conducir en una ciudad o autopista, tomando en cuenta la tecnología del vehículo, las características del tráfico, de las rutas, características climáticas y geográficas (altitud, entre las más importantes) y también características de los mismos conductores.
Estos ciclos de manejo tienen una gran importancia, entre otros fines, para planear adecuadamente el desarrollo de alguna ciudad, el desarrollo de tecnología para los nuevos automóviles, la validación de modelos que predicen el comportamiento de los vehículos en la vía pública y en los inventarios de emisiones contaminantes en las grandes urbes, los cuales a su vez permiten establecer estrategias para controlar el equilibrio ecológico del lugar, ciudad o región.
La Agencia de Protección Ambiental, de Estados Unidos, cuenta con un procedimiento de prueba federal generalmente conocido como “FTP-75” para el ciclo de conducción en ciudad.
Estos ciclos de manejo tienen una gran importancia, entre otros fines, para planear adecuadamente el desarrollo de alguna ciudad, el desarrollo de tecnología para los nuevos automóviles, la validación de modelos que predicen el comportamiento de los vehículos en la vía pública y en los inventarios de emisiones contaminantes en las grandes urbes, los cuales a su vez permiten establecer estrategias para controlar el equilibrio ecológico del lugar, ciudad o región.
La Agencia de Protección Ambiental, de Estados Unidos, cuenta con un procedimiento de prueba federal generalmente conocido como “FTP-75” para el ciclo de conducción en ciudad.
Un gran número de países pertenecientes a la Unión Europea han desarrollado muchas y muy variadas actividades tendientes a proponer ciclos de manejo más apropiados a su realidad.
Un gran número de países pertenecientes a la Unión Europea han desarrollado muchas y muy variadas actividades tendientes a proponer ciclos de manejo más apropiados a su realidad, que reproducen las condiciones de manejo de la vida actual, tanto en la ciudad como en la ruta/autopista. Por ejemplo, el Nuevo Ciclo de Conducción Europeo (NEDC, por sus siglas en inglés) consiste en cuatro ciclos de conducción ECE-15 repetidos y un ciclo de conducción extraurbano (EUDC, por sus siglas en inglés).
La figura 2 muestra un ciclo de conducción constituido en tres secciones: urbano, rural o ruta. Por otro lado, incluso ciudades, como por ejemplo Nueva York, tienen su propio ciclo de conducción específico citadino.
Es muy importante insistir en indicar siempre en qué condiciones o con qué ciclo homologado se ha realizado el ensayo, pues hay varios ciclos diferentes, y los consumos y autonomías que arrojan los vehículos también difieren. Por ejemplo, si se toman los datos de autonomía de un coche eléctrico en Japón (ciclo de homologación JC08) se observa que es mayor que la de ese mismo coche en Europa y, en cambio, si se miran los datos de Estados Unidos, es menor que en Europa.
La figura 2 muestra un ciclo de conducción constituido en tres secciones: urbano, rural o ruta. Por otro lado, incluso ciudades, como por ejemplo Nueva York, tienen su propio ciclo de conducción específico citadino.
Es muy importante insistir en indicar siempre en qué condiciones o con qué ciclo homologado se ha realizado el ensayo, pues hay varios ciclos diferentes, y los consumos y autonomías que arrojan los vehículos también difieren. Por ejemplo, si se toman los datos de autonomía de un coche eléctrico en Japón (ciclo de homologación JC08) se observa que es mayor que la de ese mismo coche en Europa y, en cambio, si se miran los datos de Estados Unidos, es menor que en Europa.
Si se toman los datos de autonomía de un coche eléctrico en Japón (ciclo de homologación JC08) se observa que es mayor que la de ese mismo coche en Europa.
 Figura 1
Figura 1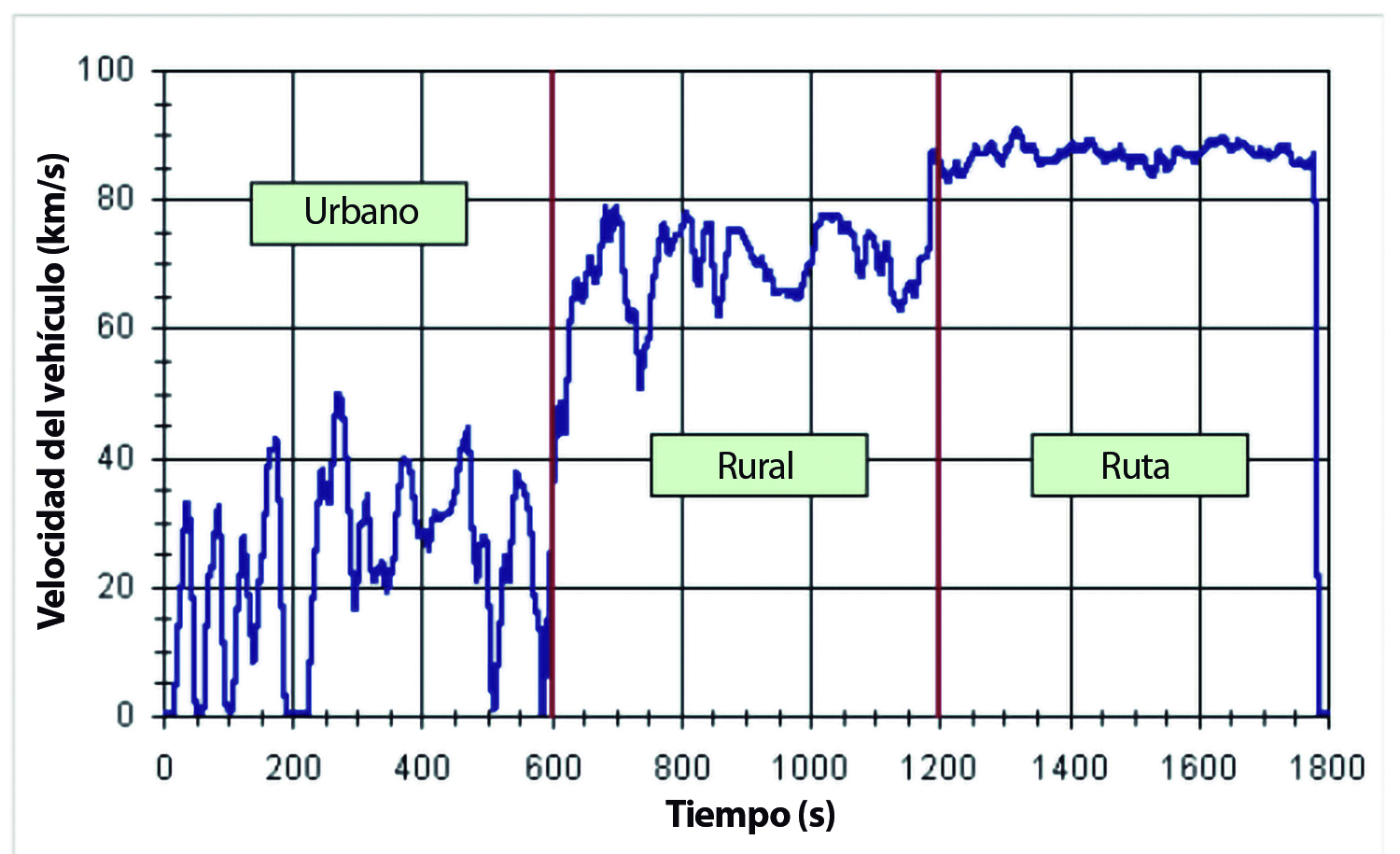 Figura 2. Ciclo de conducción constituido en tres secciones: urbano, rural o ruta.
Figura 2. Ciclo de conducción constituido en tres secciones: urbano, rural o ruta.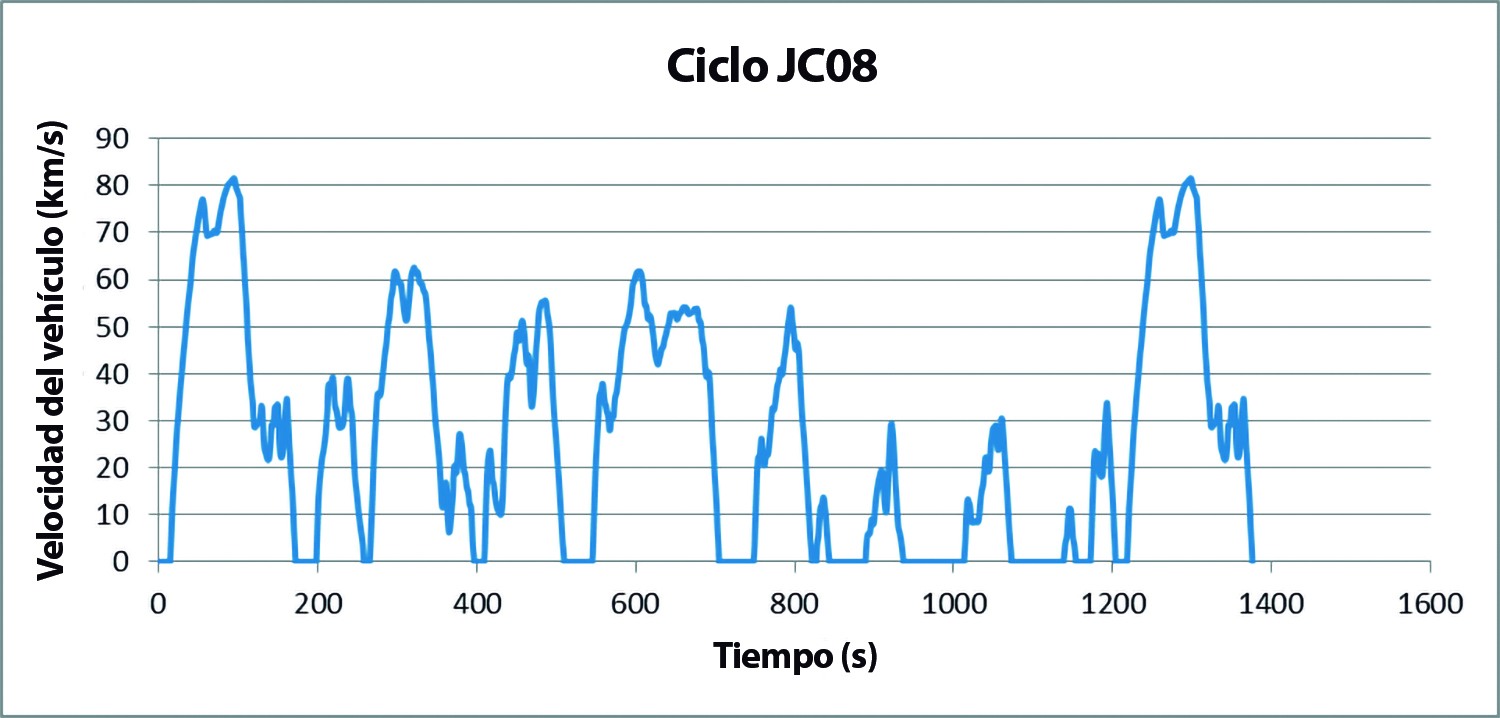 Figura 3. Ciclo JC08, de Japón
Figura 3. Ciclo JC08, de Japón
Gráfico torque/velocidad: puntos de operación de acuerdo al ciclo de conducción
En función de las características del vehículo, la máquina eléctrica, las relaciones mecánicas de transmisión y la estrategia de control electrónico, se puede calcular el par y la velocidad instantáneos necesarios para el desarrollo del ciclo y obtener un mapa de los puntos de operación del motor. MatLab permite realizar fácilmente este tipo de gráficos en los cuales los puntos se dejan como puntos desconectados entre sí.
En la figura 4 se representa un ejemplo de gráfico de dispersión de estos requisitos instantáneos de par y velocidad para un ciclo de conducción de ciudad dado. Se muestra, en este caso particular, una combinación de par alto y velocidad de rotación relativamente baja. La distribución muestra una forma elíptica, con frecuentes puntos de operación ubicados en áreas de baja velocidad de rotación y bajo torque, y velocidades de rotación más altas con combinaciones de bajo torque, así como áreas intermedias de alto torque.
En la figura 4 se representa un ejemplo de gráfico de dispersión de estos requisitos instantáneos de par y velocidad para un ciclo de conducción de ciudad dado. Se muestra, en este caso particular, una combinación de par alto y velocidad de rotación relativamente baja. La distribución muestra una forma elíptica, con frecuentes puntos de operación ubicados en áreas de baja velocidad de rotación y bajo torque, y velocidades de rotación más altas con combinaciones de bajo torque, así como áreas intermedias de alto torque.
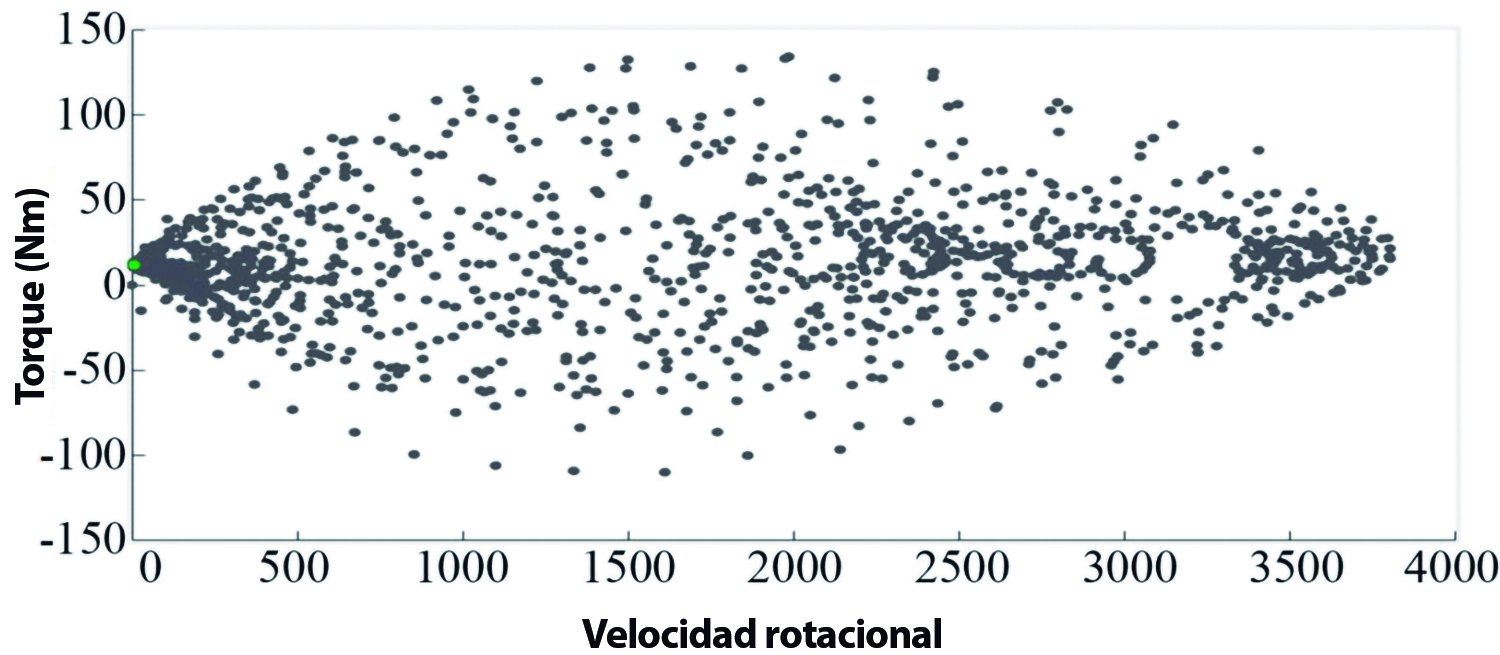 Figura 4. Gráfico de dispersión de requisitos instantáneos de par y velocidad para un ciclo de conducción de una ciudad dada.
Figura 4. Gráfico de dispersión de requisitos instantáneos de par y velocidad para un ciclo de conducción de una ciudad dada.
Gráfico torque/velocidad: curvas de eficiencia motor-controlador
Un mapa de eficiencia de una máquina eléctrica/controlador describe las diferentes curvas o zonas de eficiencia. Se obtiene en función de los parámetros constructivos del motor, principalmente. La eficiencia de las máquinas eléctricas es normalmente inferior a la del inversor y muestra una mayor variabilidad con el punto de funcionamiento y el tipo de máquina.
La figura 5 muestra las múltiples razones por las cuales la eficiencia no es constante en una máquina de tracción. La frecuencia de alimentación y la velocidad de rotación modifica de manera sustancial las pérdidas y, con ello, el rendimiento.
Con un programa de computación adecuado es posible aplicar el modelo matemático de la máquina eléctrica/controlador para realizar una simulación digital del comportamiento del sistema ante determinadas condiciones de operación.
La figura 5 muestra las múltiples razones por las cuales la eficiencia no es constante en una máquina de tracción. La frecuencia de alimentación y la velocidad de rotación modifica de manera sustancial las pérdidas y, con ello, el rendimiento.
Con un programa de computación adecuado es posible aplicar el modelo matemático de la máquina eléctrica/controlador para realizar una simulación digital del comportamiento del sistema ante determinadas condiciones de operación.
Un mapa de eficiencia de una máquina eléctrica/controlador describe las diferentes curvas o zonas de eficiencia.
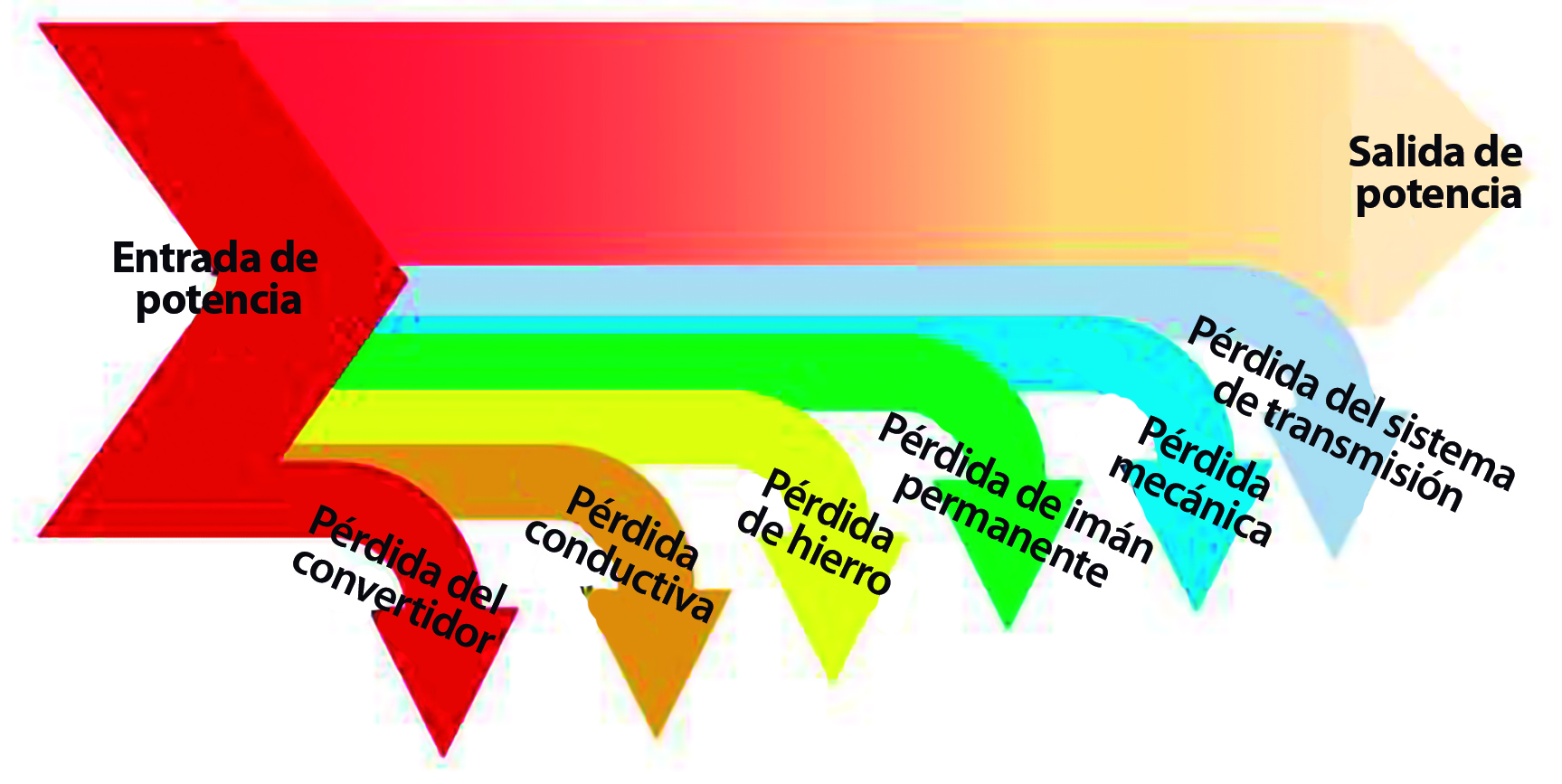 Figura 5. Diversos componentes de pérdida de una máquina eléctrica utilizada en el sistema de propulsión de vehículos eléctricos
Figura 5. Diversos componentes de pérdida de una máquina eléctrica utilizada en el sistema de propulsión de vehículos eléctricos
Entonces, se realizan las simulaciones en Matlab, Scilab u otro programa para conocer la potencia (P), el par (T) y la velocidad angular (ω) requeridas del motor eléctrico a partir de un rango de solicitudes.
En términos generales, es útil reunir todas las pérdidas diferentes en una sola ecuación que permita modelar y predecir las pérdidas en un motor. Cuando se hace esto, es útil combinar los términos de las pérdidas de hierro y las pérdidas por fricción, ya que ambos son proporcionales a la velocidad del motor.
Las pérdidas totales están dadas por la siguiente fórmula:
En términos generales, es útil reunir todas las pérdidas diferentes en una sola ecuación que permita modelar y predecir las pérdidas en un motor. Cuando se hace esto, es útil combinar los términos de las pérdidas de hierro y las pérdidas por fricción, ya que ambos son proporcionales a la velocidad del motor.
Las pérdidas totales están dadas por la siguiente fórmula:

Donde el primer término son las pérdidas en el cobre; el segundo, las pérdidas en el hierro; el tercero, las pérdidas por ventilación, y el último, las pérdidas del circuito de control electrónico, que se consideran constantes (comparativamente).
En el término ‘KcT2’, la corriente es proporcional al par ‘T’ proporcionado por el motor, y ‘kc’ es una constante que depende de las resistencias y también del flujo magnético.
La eficiencia encontrada en cada punto del gráfico de la figura 6 se obtiene aplicando en cada uno de ellos las siguientes ecuaciones:
En el término ‘KcT2’, la corriente es proporcional al par ‘T’ proporcionado por el motor, y ‘kc’ es una constante que depende de las resistencias y también del flujo magnético.
La eficiencia encontrada en cada punto del gráfico de la figura 6 se obtiene aplicando en cada uno de ellos las siguientes ecuaciones:
- eff en dicho punto = Psalida mecánica /Peléctrica entrada
- eff en dicho punto = Psalida mecánica /(Psalida mecánica + P pérdidas)
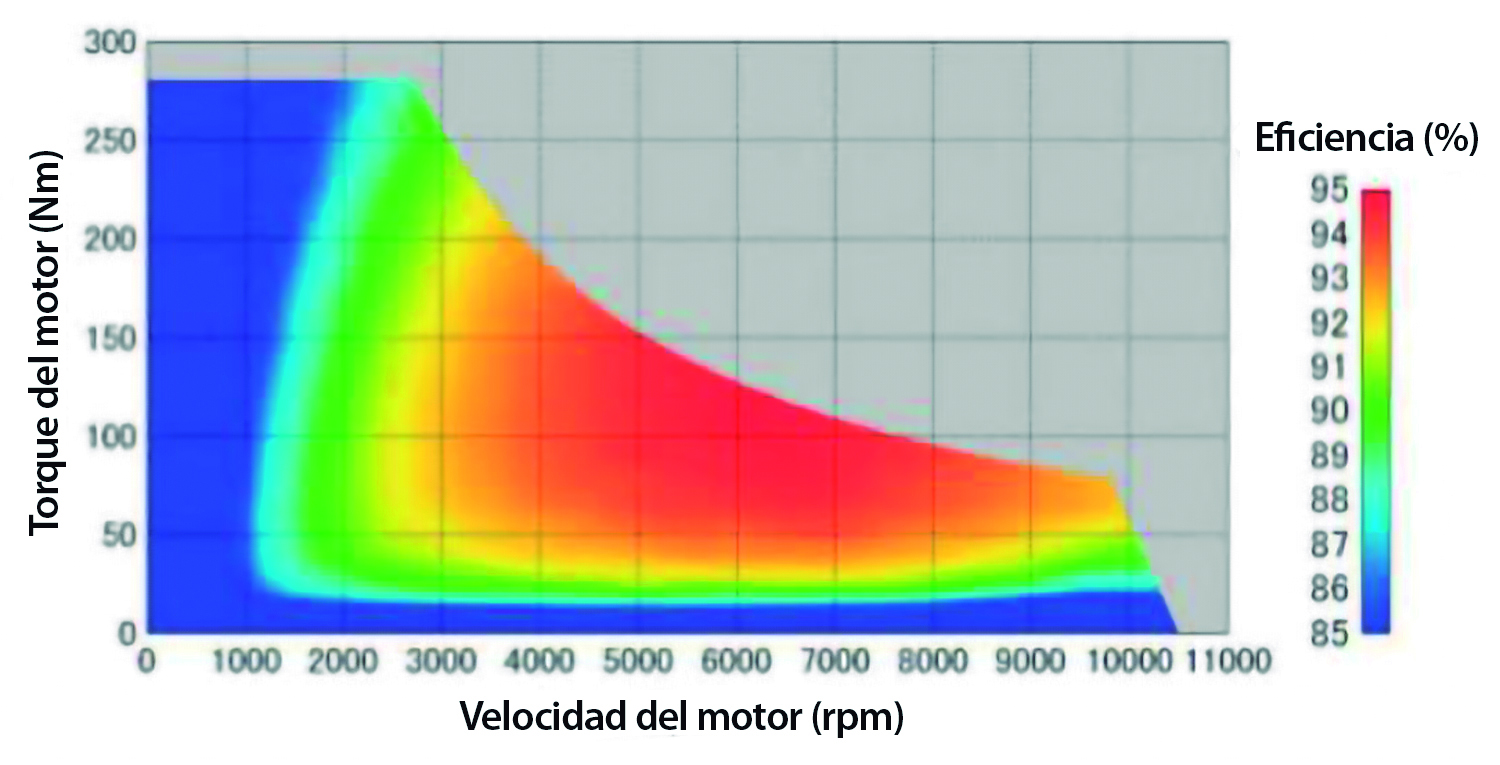 Figura 6
Figura 6
Resumen
Del mapeo de los puntos de operación del motor en función del ciclo de conducción, se obtienen datos que se deben comparar cuidadosamente con el mapa de eficiencia del motor, de manera tal que se pueda cotejar en qué región el motor opera con más frecuencia (dato que se obtiene del gráfico de puntos de operación de acuerdo al ciclo de conducción) y cuál es la eficiencia en esos puntos (datos que se obtienen de las curvas de eficiencia motor-controlador). En consecuencia, para mejorar la eficiencia de un vehículo para un determinado ciclo de conducción, la máxima eficiencia del motor se debe diseñar para cubrir su área de trabajo habitual.
Para mejorar la eficiencia de un vehículo para un determinado ciclo de conducción, la máxima eficiencia del motor se debe diseñar para cubrir su área de trabajo habitual.
Si se da el caso que el motor opera lejos de esos puntos definidos por el ciclo de conducción, con mayor eficiencia, implica que el motor no se adapta bien a este ciclo de conducción en particular y, por lo tanto, hay que elegir otro motor/controlador. Obviamente, si se da la inversa, confirma la efectividad del conjunto motor-inversor.
Se ha analizado con un ejemplo genérico que la simulación por computadora del vehículo es de vital importancia en el diseño, ya que le permite al desarrollador comprobar diferentes opciones de diseño muy rápidamente y prácticamente sin costo alguno.
Se ha analizado con un ejemplo genérico que la simulación por computadora del vehículo es de vital importancia en el diseño, ya que le permite al desarrollador comprobar diferentes opciones de diseño muy rápidamente y prácticamente sin costo alguno.
La simulación por computadora del vehículo es de vital importancia en el diseño, ya que le permite al desarrollador comprobar diferentes opciones de diseño muy rápidamente y prácticamente sin costo alguno.
Por Ricardo Berizzo
Autor:
Publicado en:
Número:
Mes:
Año: