
El primer prototipo de motor eléctrico capaz de funcionar con corriente alterna fue desarrollado y construido por el ingeniero Nikola Tesla.
Los parámetros básicos de la energía eléctrica son la tensión (V), corriente (I) y la frecuencia (f). En nuestro país, la frecuencia industrial, o simplemente frecuencia, es de 50 Hz, es decir, se genera energía eléctrica en esa frecuencia y se trata que el sistema total interconectado la mantenga en un valor entre el 5 y el 10%, según el nivel de tensión o tipo de alimentación. Dado que el período (T) es la inversa de la frecuencia, tiene una duración de 1/50: 0,02 segundos.
Los motores asíncronos o de inducción son un tipo de motor de corriente alterna. El primer prototipo de motor eléctrico capaz de funcionar con corriente alterna fue desarrollado y construido por el ingeniero Nikola Tesla y presentado en el Instituto Estadounidense de Ingenieros Eléctricos (AIEE, por sus siglas en inglés) en 1888.
El motor asíncrono trifásico está formado por un rotor que puede ser de dos tipos: a) de jaula de ardilla; b) bobinado, y un estator, en el que se encuentran las bobinas inductoras. Estas bobinas son trifásicas y están desfasadas entre sí 120º en el espacio.
Los motores asíncronos o de inducción son un tipo de motor de corriente alterna. El primer prototipo de motor eléctrico capaz de funcionar con corriente alterna fue desarrollado y construido por el ingeniero Nikola Tesla y presentado en el Instituto Estadounidense de Ingenieros Eléctricos (AIEE, por sus siglas en inglés) en 1888.
El motor asíncrono trifásico está formado por un rotor que puede ser de dos tipos: a) de jaula de ardilla; b) bobinado, y un estator, en el que se encuentran las bobinas inductoras. Estas bobinas son trifásicas y están desfasadas entre sí 120º en el espacio.
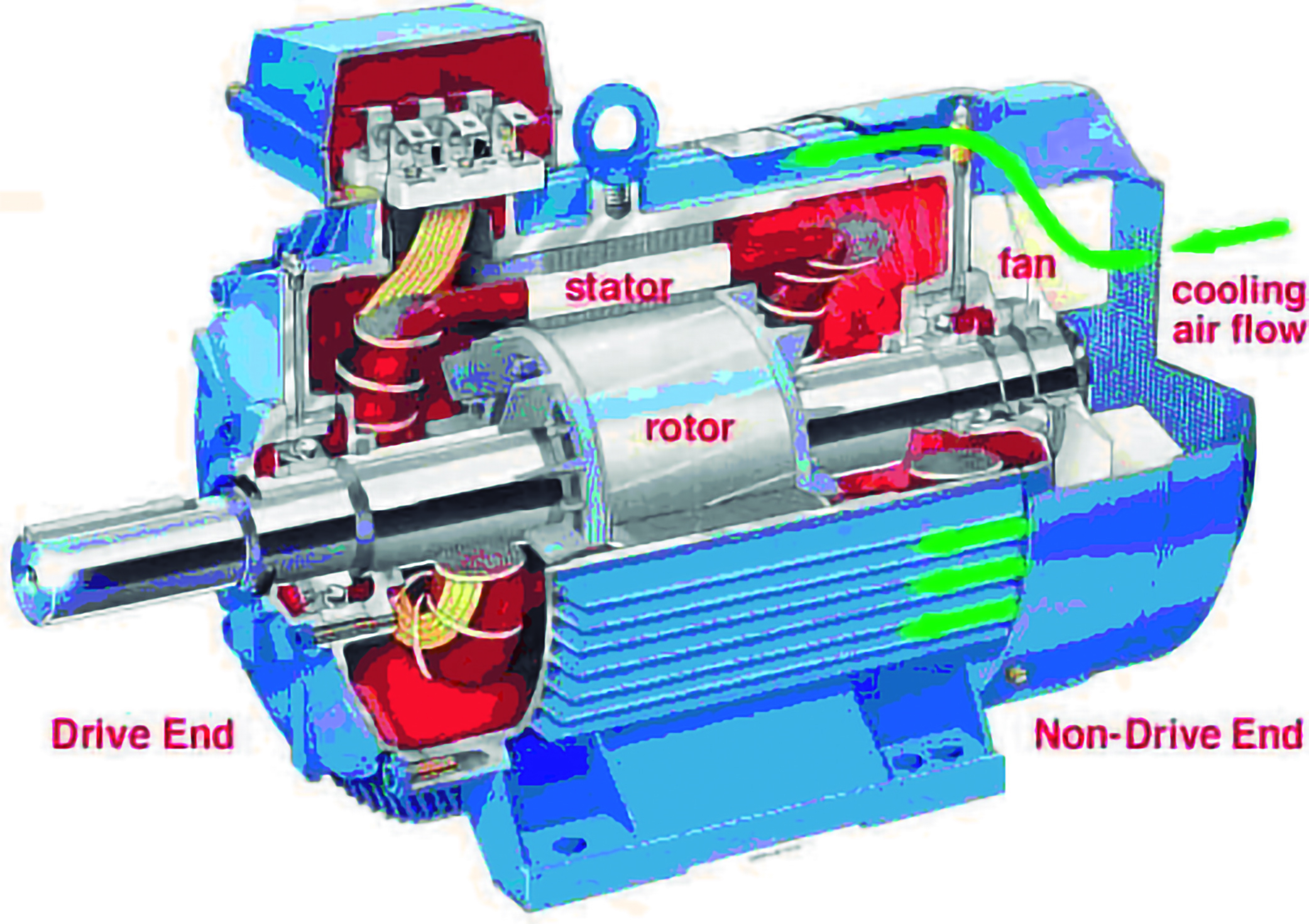 Figura 1. Partes del motor asíncrono trifásico
Figura 1. Partes del motor asíncrono trifásico
Según el Teorema de Ferraris, cuando por estas bobinas circula un sistema de corrientes trifásicas equilibradas cuyo desfase en el tiempo es también de 120º, se induce un campo magnético giratorio que envuelve al rotor. Este campo magnético variable va a inducir una tensión en el rotor según la Ley de Inducción de Faraday.
La parte fija del circuito magnético (estator) es un anillo cilíndrico de chapa magnética ajustado a la carcasa que lo envuelve. La carcasa tiene una función puramente protectora. En la parte interior del estator hay unas ranuras, en donde se coloca el bobinado.
En el interior del estator se coloca el rotor, que es un cilindro de chapa magnética fijado al eje. En su periferia hay unas ranuras en las que se coloca el bobinado correspondiente. El entrehierro de estos motores es constante en toda su circunferencia y su valor debe ser el mínimo posible.
Los dos circuitos eléctricos se sitúan, uno en las ranuras del estator, y otro en las del rotor, que está cortocircuitado. El rotor en cortocircuito puede estar formado por bobinas que se cortocircuitan en el exterior de la máquina directamente o mediante reóstatos; o bien, puede estar formado por barras de cobre colocadas en las ranuras, que han de ser cuidadosamente soldadas a dos anillos del mismo material, llamados “anillos de cortocircuito”. Este conjunto de barras y anillos forma el motor de jaula de ardilla.
La parte fija del circuito magnético (estator) es un anillo cilíndrico de chapa magnética ajustado a la carcasa que lo envuelve. La carcasa tiene una función puramente protectora. En la parte interior del estator hay unas ranuras, en donde se coloca el bobinado.
En el interior del estator se coloca el rotor, que es un cilindro de chapa magnética fijado al eje. En su periferia hay unas ranuras en las que se coloca el bobinado correspondiente. El entrehierro de estos motores es constante en toda su circunferencia y su valor debe ser el mínimo posible.
Los dos circuitos eléctricos se sitúan, uno en las ranuras del estator, y otro en las del rotor, que está cortocircuitado. El rotor en cortocircuito puede estar formado por bobinas que se cortocircuitan en el exterior de la máquina directamente o mediante reóstatos; o bien, puede estar formado por barras de cobre colocadas en las ranuras, que han de ser cuidadosamente soldadas a dos anillos del mismo material, llamados “anillos de cortocircuito”. Este conjunto de barras y anillos forma el motor de jaula de ardilla.
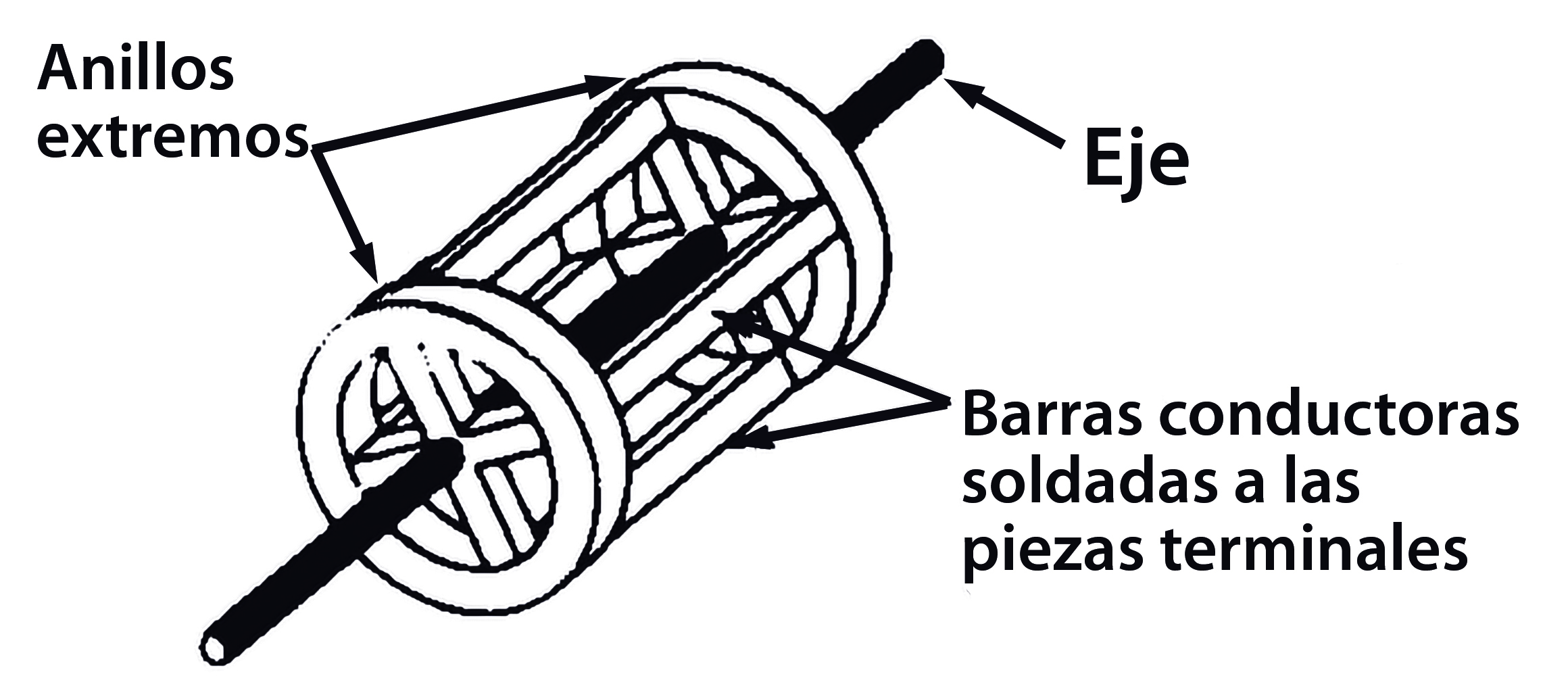 Figura 2. Jaula de ardilla
Figura 2. Jaula de ardilla
Conceptos básicos de los motores de inducción
La velocidad de rotación del campo magnético o “velocidad de sincronismo” está dada por la siguiente fórmula:
donde “fe” es la frecuencia del sistema, en hertzios y “p” es el número de par de polos en la máquina. La velocidad se mide en revoluciones por minuto (rpm).
Durante el funcionamiento, la velocidad del rotor baja hasta la velocidad de carga “n”. La diferencia entre la velocidad sincrónica y la de carga se denomina “deslizamiento (s)”.
[2] S (absoluto) = ns - n
[3] S (relativo) = ns - (n/ns)
En base a este deslizamiento “s”, dependiente de la carga mecánica en el eje, la tensión inducida en el bobinado del rotor cambia y éste, a su vez, cambia la corriente del rotor y el par de torsión “M”.
En un motor asincrónico trifásico, el campo magnético gira a una cierta velocidad, y la rotación del rotor no está sincronizada con la velocidad de rotación del campo magnético. Por ello se llaman “asincrónicos” y no “sincrónicos”.
Por definición, la potencia responde a la siguiente fórmula:
[4] Potencia = Cupla o Par de Torsión * Velocidad
El par o cupla en el eje está dado por la siguiente fórmula:

en donde “U” es la tensión en volts; “I”, la intensidad en amperes; “cos φ”, el factor de potencia; “η”, el rendimiento, y “n”, la velocidad.
donde “fe” es la frecuencia del sistema, en hertzios y “p” es el número de par de polos en la máquina. La velocidad se mide en revoluciones por minuto (rpm).
Durante el funcionamiento, la velocidad del rotor baja hasta la velocidad de carga “n”. La diferencia entre la velocidad sincrónica y la de carga se denomina “deslizamiento (s)”.
[2] S (absoluto) = ns - n
[3] S (relativo) = ns - (n/ns)
En base a este deslizamiento “s”, dependiente de la carga mecánica en el eje, la tensión inducida en el bobinado del rotor cambia y éste, a su vez, cambia la corriente del rotor y el par de torsión “M”.
En un motor asincrónico trifásico, el campo magnético gira a una cierta velocidad, y la rotación del rotor no está sincronizada con la velocidad de rotación del campo magnético. Por ello se llaman “asincrónicos” y no “sincrónicos”.
Por definición, la potencia responde a la siguiente fórmula:
[4] Potencia = Cupla o Par de Torsión * Velocidad
El par o cupla en el eje está dado por la siguiente fórmula:
en donde “U” es la tensión en volts; “I”, la intensidad en amperes; “cos φ”, el factor de potencia; “η”, el rendimiento, y “n”, la velocidad.
Relación entre tensión y frecuencia
Los motores de corriente alterna, trifásicos y asincrónicos se fabrican para producir su cupla nominal con una cierta relación entre tensión y frecuencia. Es fácil saber cuál es este valor. Si se trata de un motor de 380 V/50 Hz, la relación será 380 V/50 Hz, o sea 7,6 V/Hz. Si se trata de alimentación en 60 Hz, ese valor será menor.
Los motores de corriente alterna, trifásicos y asincrónicos se fabrican para producir su cupla nominal con una cierta relación entre tensión y frecuencia.
Este valor de la relación entre tensión y frecuencia es muy importante porque el motor tendrá su par nominal o cupla nominal o torque nominal. El valor queda indicado en la chapa del motor.
Cuando se trabaja con velocidades variables, es importante controlar esta relación entre tensión y frecuencia. En los casos de cargas de cupla constante, debe ser constante.
Es importante introducir ahora este concepto de la relación entre tensión y frecuencia, porque cuando se utilizan variadores de velocidad, es un parámetro importante. No así si se trabaja sin variador de velocidad, ya que en ese caso la relación está dada por la tensión y la frecuencia que entrega la compañía de electricidad, que es constante.
Cuando se trabaja con velocidades variables, es importante controlar esta relación entre tensión y frecuencia. En los casos de cargas de cupla constante, debe ser constante.
Es importante introducir ahora este concepto de la relación entre tensión y frecuencia, porque cuando se utilizan variadores de velocidad, es un parámetro importante. No así si se trabaja sin variador de velocidad, ya que en ese caso la relación está dada por la tensión y la frecuencia que entrega la compañía de electricidad, que es constante.

¿Por qué usar una mayor frecuencia que los 50 Hz?
La razón por la que queremos usar una mayor frecuencia que los 50 Hz es porque queremos que los motores giren a mayor velocidad que los motores estándar. Mayor frecuencia (Hz) implica mayor velocidad (rpm), que a su vez requiere mayor potencia (kW).
La razón por la que queremos usar una mayor frecuencia que los 50 Hz es porque queremos que los motores giren a mayor velocidad que los motores estándar.
Un motor eléctrico asincrónico trifásico de un determinado tamaño puede desarrollar una mayor potencia de salida si su velocidad de rotación aumenta. Para conseguir que el motor gire más rápidamente, el campo magnético debe también girar más rápidamente, y esto se consigue incrementando la frecuencia de la corriente.
Un motor eléctrico puede producir un cierto par a una velocidad, y esto depende principalmente de la cantidad de polos del motor y de la frecuencia a la que gira.
Si el par de un motor se mantiene constante, la potencia se verá incrementada proporcionalmente al incremento de la frecuencia. Si se duplica la frecuencia, la velocidad del motor aumentará al doble, y con un par constante, la potencia se incrementará al doble (ver figura 3).
Un motor eléctrico puede producir un cierto par a una velocidad, y esto depende principalmente de la cantidad de polos del motor y de la frecuencia a la que gira.
Si el par de un motor se mantiene constante, la potencia se verá incrementada proporcionalmente al incremento de la frecuencia. Si se duplica la frecuencia, la velocidad del motor aumentará al doble, y con un par constante, la potencia se incrementará al doble (ver figura 3).
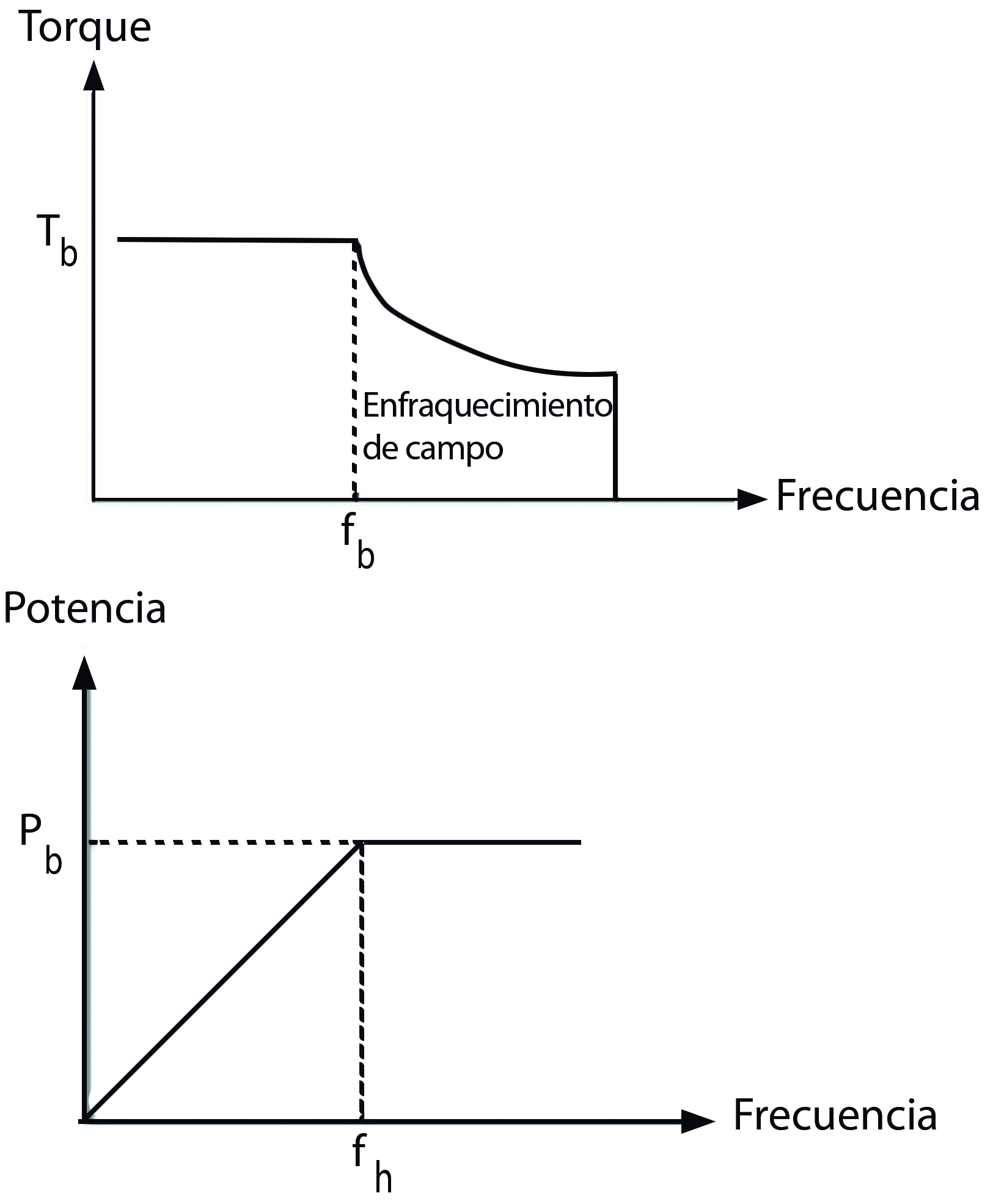 Figura 3. Si se duplica la frecuencia, la velocidad del motor aumentará al doble, y con un par constante, la potencia se incrementará al doble
Figura 3. Si se duplica la frecuencia, la velocidad del motor aumentará al doble, y con un par constante, la potencia se incrementará al doble
Por ejemplo, para un sistema de 50 Hz y un motor de cuatro polos, la velocidad de rotación del motor (n) es de 1.450 rpm:
[6] P = 11 Nm * 1450 rpm/9.550 = 1,67 kW
[7] 3.597.122 Nm * 1 rev * 1 h/1 kW/h * 2 * Pi * 60 min = 9.550
Para un sistema de 440 Hz y un motor de cuatro polos, la velocidad de rotación del motor (n) es de 13.000 rpm:
[8] P = 11 Nm * 13.000 rpm/9.550 = 15 kW
Para un sistema de 1.000 Hz y un motor de cuatro polos, la velocidad de rotación del motor (n) es de 29.000 rpm:
[9] P = 11 Nm * 29.000 rpm/9550 = 33,4 kW
[6] P = 11 Nm * 1450 rpm/9.550 = 1,67 kW
[7] 3.597.122 Nm * 1 rev * 1 h/1 kW/h * 2 * Pi * 60 min = 9.550
Para un sistema de 440 Hz y un motor de cuatro polos, la velocidad de rotación del motor (n) es de 13.000 rpm:
[8] P = 11 Nm * 13.000 rpm/9.550 = 15 kW
Para un sistema de 1.000 Hz y un motor de cuatro polos, la velocidad de rotación del motor (n) es de 29.000 rpm:
[9] P = 11 Nm * 29.000 rpm/9550 = 33,4 kW
¿Cual es la ventaja de los 440 Hz frente a los 1.000 Hz?
Tal como se dijo más arriba, si se duplica la velocidad de rotación de un motor y el par se mantiene constante, la potencia de salida del motor se duplica. Por tanto, en teoría, con una mayor frecuencia, el motor será más pequeño y más liviano para obtener la misma potencia de salida.
Si se duplica la velocidad de rotación de un motor y el par se mantiene constante, la potencia de salida del motor se duplica.
Pero para todo existe un tamaño práctico y se debe buscar una mayor fiabilidad que una optimización del peso para un rango de potencia. Por ejemplo, se trabaja con 400 Hz como frecuencia base en los centros de control numérico.
Un motor de cuatro polos a 400 Hz de corriente girará a una velocidad nominal de 12.000 rpm. Un motor de cuatro polos a 1.000 Hz de corriente girará a una velocidad nominal de 30.000 rpm.
Dado que es preferible basar los diseños en principios razonables, los motores de 1.000 Hz no siempre fueron una opción. Conseguir que los rodamientos sobrevivan en un entorno tan duro no es fácil y puede causar problemas a largo plazo. Obligar a los motores a trabajar a una frecuencia menor puede aumentar la vida de los rodamientos y evitar tareas de mantenimientos frecuentes.
Un motor de cuatro polos a 400 Hz de corriente girará a una velocidad nominal de 12.000 rpm. Un motor de cuatro polos a 1.000 Hz de corriente girará a una velocidad nominal de 30.000 rpm.
Dado que es preferible basar los diseños en principios razonables, los motores de 1.000 Hz no siempre fueron una opción. Conseguir que los rodamientos sobrevivan en un entorno tan duro no es fácil y puede causar problemas a largo plazo. Obligar a los motores a trabajar a una frecuencia menor puede aumentar la vida de los rodamientos y evitar tareas de mantenimientos frecuentes.
Al hacer funcionar los motores a 12.000 rpm, estamos penalizados con un peso mayor, pero se puede compensar si se opta por una mayor calidad en los componentes, especialmente en la jaula de ardilla de cobre.
Hacer funcionar un motor a 1.000 Hz es la forma económica de conseguir un motor relativamente potente con un peso reducido. Pero existen demasiados inconvenientes con este sistema. Al hacer funcionar los motores a 12.000 rpm, estamos penalizados con un peso mayor, pero se puede compensar si se opta por una mayor calidad en los componentes, especialmente en la jaula de ardilla de cobre. Este tipo de rotor ofrece alrededor de un 30% más de potencia de salida que los rotores de fundición de aluminio, aunque son más caros de fabricar. No obstante, es la mejor opción, dado que la fiabilidad es un factor muy importante.
Un ejemplo es el motor del Tesla Roadster, cuyas características son las siguientes:
Un ejemplo es el motor del Tesla Roadster, cuyas características son las siguientes:
- Tipo: motor eléctrico de tres fases y cuatro polos.
- Potencia neta máxima: 248 CV (185 kW).
- Velocidad máxima: 13.000 rpm.
- Par máximo: 200 lbf ft (270 Nm), desde 0 a 6.000 rpm.
- Eficiencia: 90% en promedio y 80% en potencia pico.
Las dimensiones reducidas del equipo son otra de las obvias ventajas del sistema. El convertidor de frecuencia (inversor) es considerablemente más ligero.
La función principal del convertidor de frecuencia es suministrar una alimentación de corriente de frecuencia variable al motor de alta frecuencia.
Por ejemplo, si la corriente de alimentación del convertidor es trifásica, 380-500 V, 50-60 Hz:
[10] Entrada: 50-60 Hz
[11] Salida: 330-440 Hz
Simplificando mucho el tema, se puede decir que un convertidor de frecuencias primero rectifica la corriente trifásica convirtiéndola en corriente continua, y luego construye una onda sinusoidal con la frecuencia deseada indicando a un módulo de potencia la frecuencia y el voltaje que quiere obtener. Las señales salen de un microprocesador, controladas por un software, para la creación de las ondas sinusoidales.
A mayor número de pulsos de voltaje por ciclo, mayor aproximación a la onda sinusoidal.
Con menor número de pulsos, peor se consigue acercarse a una senoide, provocando la creación de ondas armónicas que deben ser filtradas para evitar las excesivas interferencias electromagnéticas.
Uno de los problemas con esta tecnología es que las ondas no perfectas pueden generar interferencias en la red. Por ello, se debe diseñar un filtro a medida, que aislará la interferencia lo mejor posible.
La función principal del convertidor de frecuencia es suministrar una alimentación de corriente de frecuencia variable al motor de alta frecuencia.
Por ejemplo, si la corriente de alimentación del convertidor es trifásica, 380-500 V, 50-60 Hz:
[10] Entrada: 50-60 Hz
[11] Salida: 330-440 Hz
Simplificando mucho el tema, se puede decir que un convertidor de frecuencias primero rectifica la corriente trifásica convirtiéndola en corriente continua, y luego construye una onda sinusoidal con la frecuencia deseada indicando a un módulo de potencia la frecuencia y el voltaje que quiere obtener. Las señales salen de un microprocesador, controladas por un software, para la creación de las ondas sinusoidales.
A mayor número de pulsos de voltaje por ciclo, mayor aproximación a la onda sinusoidal.
Con menor número de pulsos, peor se consigue acercarse a una senoide, provocando la creación de ondas armónicas que deben ser filtradas para evitar las excesivas interferencias electromagnéticas.
Uno de los problemas con esta tecnología es que las ondas no perfectas pueden generar interferencias en la red. Por ello, se debe diseñar un filtro a medida, que aislará la interferencia lo mejor posible.
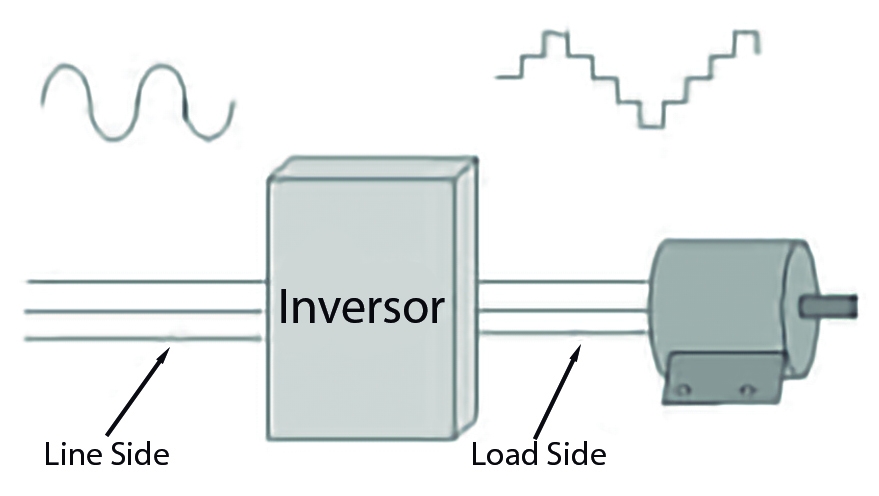 Figura 4. Convertidor de frecuencia
Figura 4. Convertidor de frecuencia
Por Ricardo Berizzo
Autor:
Publicado en:
Número:
Mes:
Año: